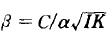
�������ٹ��D������Ӌ����������ͨ��e���S�������Ĵ�С����׃��,���ֱ��Q��׃��e����Ӌ�������D��ʽ����Ӌ,�����H��Ч�ؔU����ԭ�������D������Ӌ�Ĝy������,��������ˌ�ʹ�íh(hu��n)�����m����,߀�ɜy����N���|(����һЩ��ճ�Ⱥ��g�Խ��|)������,�e�m�˜y���С�С�����^�����Z��(sh��)���С�С����,�̶Ƚ��ƾ���(���̶ȷǾ��Գ̶ȼs��20%һ25%,ͨ�^ָʾ���е�݆���M������),���̱Ȟ�1;10,�������Ը���,����pʧ�^С�Һ㶨,��������2.5%����,ʹ�þS�o����,���x��ǰ��ֱ�ܶ�Ҫ��,�e�Ǯ�������׃���ʽ��λ���D�Q��,߀���M���h���x��̖��ݔ�͌��F(xi��n)�Ԅӿ��ơ��{�����������@Щ���������c,�������,���ڇ��������y���I��������܊ͻ��,�_ʼ�V�������ڇ�����������ʯ�͡�ұ���t(y��)ˎ���p���ȹ��I(y��)���T��Һ�w�����w�����y�����Ԅӿ���ϵ�y(t��ng)��
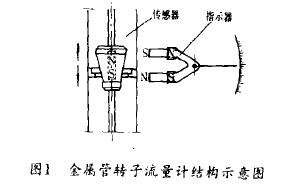
�������ٹ��D������Ӌ�ĽY����D1��ʾ,�������и���λ�õ�׃����ӳ�������Ĵ�С,�����y���l(f��)��׃��,�x����ָʾ�˳�(�\�Ӳ���)����ԭ����ƽ��λ���Ƅӵ��µ�ƽ��λ��,����ָʾ�˳��ɑ��|�Ե�����,����������ֹͣ���µ�ƽ��λ��,���ڴ�λ�ø���������ʎ���e�Ǯ�ԓ�x�������ڜy�����w�����r,�ڹ�·ϵ�y(t��ng)���Еr���F(xi��n)���w���}�ӬF(xi��n)��,ʹ�Â������и��ӳ��F(xi��n)���͵ęCе���,ͨ�^�ŵ���,�@�N�к�����ӌ������f�oָʾ���е�ָʾ�˳�,���ص�Ӱ푃x���Ĝʴ_�x��(sh��)�����ھ�����h�����ܵăx��,߀������ݔ����̖�IJ�ƽ��(w��n),��ʹ�c֮����ӛ䛃x����ӛ䛇���ʧ�档���,Ҫ�˷��@�N���w�}��Ч������ęCе��ӬF(xi��n)��,�P������ָʾ�����O�������b��,��������x��(sh��)���ȡ�
�������¾Ϳ՚������b�á�Һ�w�����b�úʹŸБ������b�õ����������M�з������^��
�����D2��ӳ�˸�������ճ��һ�ض���������,�ĈD���Եõ��@�ӵĽYՓ:���ڿ՚�ճ�Ⱥ����ܜضȲ���Ӱ�,�՚�����Ĝضȷ�(w��n)���Ա�������Һ�w����Ҫ��,�՚�����ֵ�S�ض�׃����С,�������cҺ�w�ʹŸБ������෴,�՚������S�ض����߶�����,�����������ijߴ�������,���Ժ��ٲ��á�Һ�w�����mȻ�ڷdz�С�Ŀ��g�Ȏ��܉�õ��o�������,�������Ĝضȷ�(w��n)���Ա������Ŀ՚⡢�ŸБ�����Ҫ��,��������ֵ�S�ض�׃�����ŸБ�����Ĝضȷ�(w��n)�����c�՚��������,��������ֵ�S�ض�׃����С,���ҴŸБ�������һ�N�����A�y�����������ʽ�����κνo���h(hu��n)���ضȵėl����,����(j��)�ŸБ������b�õ��OӋ����(sh��)�������ľ���Ӌ�������һ����Ҫ����ָ��:�������ء��ŸБ������b�îa(ch��n)�����������؇�����c�\�����w�ٶȵ�һ�η�������,����Ӱ푃x�����o�B(t��i)����,�ڽY����Ҳ�����F(xi��n)��
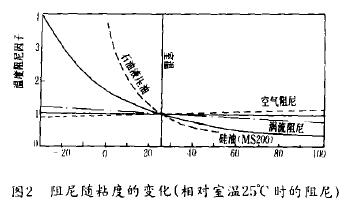
����ֵ��ָ������,�ŸБ������b�õĹ���ԭ�팍�|����늴ŌW��Փ�����U����һ�N�u���ęCеЧ����
����u���d�w���~(���F���Ե������w����)����,����ôԓ�N�ŸБ������b�õ����������S�ض�ÿ����1�����s����0.4%(���Դ�sҪ��һ�������Ĵ�·�Ĝض�ϵ��(sh��)Ӱ�)���ɴ˿�Ҋ,�ŸБ�������@Щ���c��������������b�����o���ȔM�ġ����,�҂����ôŸБ������b����ʮ�ֺ��m�ġ�
�������ھ��w�������b��,����r�g�ǂ���Ҫ�ą���(sh��)������r�g��ָ���x���D�Ӳ��ֲ���(����ָʾ�˳��ڃ�)���_ʼ�\�ӵ���ƽ��λ�ø������,����������^�o��ֵ��a�����M���x��(sh��)�ĕr�g��
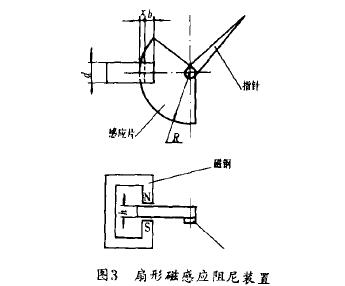
�����P�ڴŸБ������b���OӋӋ��,�@�����e�������ô�䓺ͷ��F���Ե������w���������~��ĴŸБ������b��(Ҋ�D3)�M�н�B��
�������O����֪���S����r�g(t2)�Ӻ����S��ӷ���a�r,�tӋ���OӋ�IJ��E����:
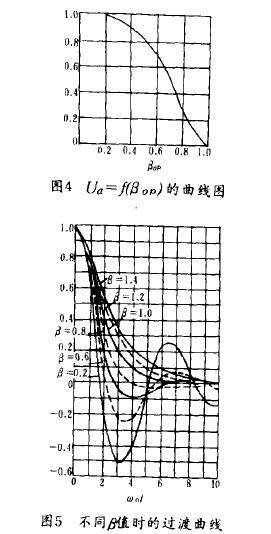
ʽ��aoһ�x���D�Ӳ��ַ�(w��n)����ĽǶ�
�������ÈD4�������������(sh��)�¡�p,�����ÈD5�������_��(��ot) tmin��������bֵ(��o��o����rϵ�y(t��ng)������ӵĽ��l��)
(2)���x�������δŸБ������b�õĽY���l��,���x��Ҫ�ߴ�(��Ҋ�D3���˵ĸ����P�ߴ�)��
(3)���x���\��ϵ�y(t��ng)�ĽY���ߴ�ͅ���(sh��)Ӌ���ot,�����ù�ʽ:
��0��(��ot)min/tz
�M��У�@Ȼ,�����0,��ʹtz�pС��
(4)Ӌ�����δŸБ������b�õ�����ϵ��(sh��)C:
ʽ��
h�����θБ�Ƭ���,Cm
b����䓽����L��,cm
d����䓽��挒��,Cm
B���ŸБ�����,TR
R�����ΰ돽,cm
�ѡ����θБ�Ƭ���ϵ������,��mm2/m
X����䓵����θБ�Ƭ߅���ď�����x,em
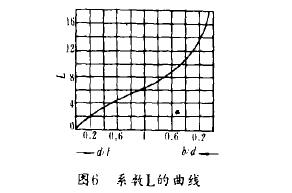
L��ϵ��(sh��),�ɈD6���
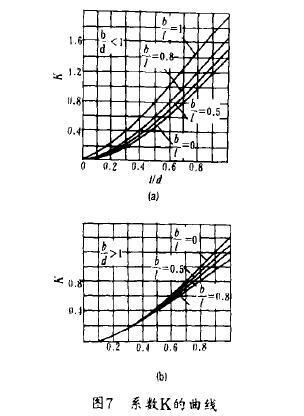
K��ϵ��(sh��),�ɈD7(�D7�з�̖��=b+2x������,����ʽӋ��:
K=2(KlһK2ʮK3һ����)
����ʽ��ϵ��(sh��)Kl��K2��K3�����քe����1=bʮ2X����2=2x(bʮ2X)����3=3(b+2X)���ɈD7����������C��,ֻ��Ӌ��Kl��K2�ɂ�ϵ��(sh��)����,��Ӌ���`����^10%.
(5)�ɹ�ʽb= 1132-9������OӋ�������b�õ�������(sh��)bֵ�Č��Hֵ(I���\�Ӳ������D�ӑT��)��
(6)��Ӌ�㷨�_������r�g��2
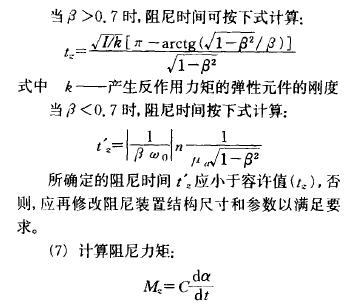
ʽ��a���x���D�Ӳ��ֵ�ƫ�D��
da/dt���x���D�Ӳ��ֵĽ��ٶ��@��������sɢ�ň��ʹň��ķǾ�����,���Ԍ��H�õ�����������ͨ���Ը���Ӌ��õ����������ء�
��������,���Կ����������\�������b��,���^���ס��^�ɹ��ؿ˷��������w���ӵ��}�Ӷ��ɔ_��Ӱ푽��ٹ��D������Ӌ���M�������y���r����ʎ�F(xi��n)��,����˜y���Ĝʴ_�ȡ�
���σ��݁�Դ�ھW(w��ng)�j�������֙�Ո(li��n)ϵ���h��!