ժҪ:�u݆����Ӌ�Ǒ��ÏV��������Ӌ���x�������ĽY�����Ρ��`���ȸߡ������pʧС���e�������õ��؏��ԡ������Ա����Ñ�����A�������L���ԁ���������Ǿ������ԵĴ��ڣ�ʹ�������y�������ܵ��ܴ��Ƽs��ͨ�^���u݆����Ӌݔ���}�_��̖���Ե��о��ͷ����������һ�N�U��u݆����Ӌ���̷����ķ������@�N�����������С���֮��Ч���ɑ����������}�_�l��ݔ���Ă�������ȥ��
1�u݆�����������Ĺ���ԭ��
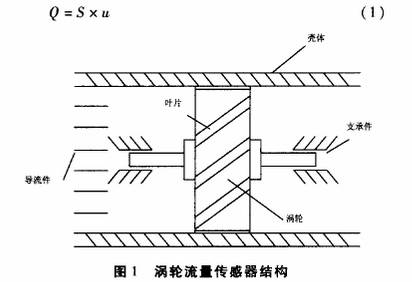
�����u݆�����������Y����D1��ʾ�������ٶ�ʽ�������������u݆�������wͨ���У��S�����w�����Ӯa�����D���O�u݆���D�ٞ�n�����^�u݆�����w�ٶȞ�u,�tn�cu������;���wͨ������ͨ����.�eS����֪�ij��������ԣ����^�u݆���������������w�w�e����Q��:
�����y�����w�ٶ�uͨ��������늴ŸБ�ԭ�팢�c���w�ٶȳ����ȵĜu݆�D��n׃���}�_�l��F:
F=Nxn(2)
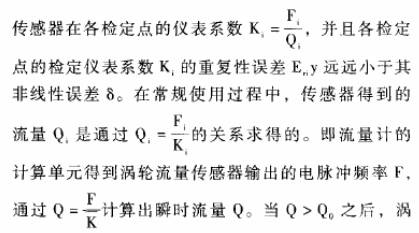
������ʽ(2)�У�N�ǜu݆�������������~Ƭ����n���~݆�����D�ٶȡ��u݆����������һ���x�������~Ƭ��N���鳣����������̖�l��F�c�D��n�ʾ����Pϵ;�����~݆���D��n���������w������u,���ڽ���eS�㶨����ͨ��·���ɹ�ʽ(1)��Ҋ�����w�ٶ�u�c����Q֮�gҲ�ʾ����Pϵ�����ԣ���}�_��̖�l��FҲ������������Q����ʹ�Üu݆�����������r��ֻҪ�y��������ݔ����}�_��̖�l��F���Ϳ���Ӌ����������w�e����Q��
�����mȻ��}�_��̖�l��F�c�w�e����Q�������Pϵ���������ֵ�s���dz�������ԭ�������w��Ħ��������ճ������������D�Q����늴������Լ��u݆�S�c�S��֮�g�ęCеĦ�������ȶ��c���w�������ٶ����P�������� �����_�������g���Pϵ��
�����_�������g���Pϵ��
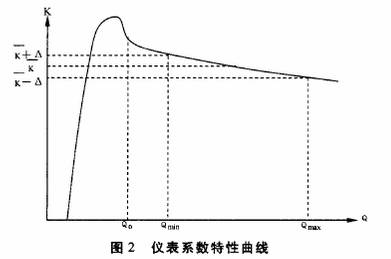
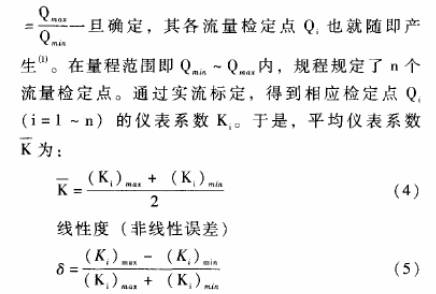
����ʽ�У�M�ǜu݆������ݔ������}�_����V�����^�u݆�����������w�w�e����`K��ͨ�^��λ���w�����u݆�����������l������}�_�l�ʻ��λ�w�e���w�u݆�����������l������}�_����`K�Q��u݆������������ƽ���x��ϵ�����D2��ʾ��`K�cQ֮�g���Pϵ��������Ҏʹ�÷������ڜu݆�����������Ĝy������QminһQmax�ȣ��y�ø������z���c�ăx��ϵ��Ki������Ktȡƽ��ֵ�õ�`K����`K����ԓ��������ƽ���x��ϵ�����M�������y���r���y�Üu݆�����������l������}�_�l��F�������� �õ�����������Qֵ���Ķ���������y���΄ա�
�õ�����������Qֵ���Ķ���������y���΄ա�
2�u݆�����������Ĝy������
�����D2�@ʾ�y������}�_��̖�l��F��ƽ���x��ϵ��`KӋ��õ���Qֵ����Qmin~Qmax�����ȵ���������`���:

������Q<Qmin��Q>Qmax�����ڜy������֮���`����^��max���@�����f�mȻ�u݆�������������кܺõ��؏��ԣ�����������}�_��̖�l��F�c�w�e����Q֮�g�ǷǾ��Եģ����ճ�Ҏ��ƽ���x��ϵ��`K��Ӌ�㷽��������һ�����`����ʿA�����ڷǾ����`��Ĵ���ʹ�Üu݆�����������Ĺ�������ֻ������Qmin~Qmax֮�ȡ�
���������؏��Ժܺö����Զ��^��Ĝu݆������������Ҫ�U����y��������pС�y���`��о��ĺ��Ć��}���OӋһ�N��ݵ�ʹ�÷������������b��Ҏ������ԭ�Йz��������ʹ�u݆�����������ھ��к�С�؏����`������������ȣ����ܵõ��ܜʴ_�y��Ч����
3�u݆�����������ij�Ҏʹ�÷���
�����������ٶ�ʽ����Ӌһ�ӣ��u݆�������������S�rҪ���՜u݆�����������b��Ҏ��(JJG198-94)��Ҏ���M��Ӌ�����ܙz���������������̱�a
�������չ�ʽ(5)Ӌ��õ��Ǿ����`��ġ�1.0%,�������̱�a=10�Ĝu݆���������������y���F��������ƽ���x��ϵ��`KӋ��������Ӌ�������_��1.0��ˮƽ��һ�����y���_����ָ��;�����H�z�������@ʾ���������z���cQi�ϵăx��ϵ��Ki���؏����`��Eri���������_��0.1%����0.01%����֮�ȡ�Eri�ɹ�ʽ(6)Ӌ��õ���


�u݆�������������؏����`��Er=Enmax
����ͨ����r�£��u݆���������������̱�a=10���Ǿ����`��ġ�1.0%���؏����`��Er��0.01�������ʹ�Üu݆�����������M�������y���r�����x��ϵ.��ȡƽ��ֵ��������ƽ���x��ϵ��`K����ֱ��ʹ�ø������z���c�ęz���x��ϵ��Ki�����п��ܱ���Ǿ����`������y����Ӱ푡��u݆�����������Ĝy���`����п��ľ��ԶȦ�=1.0%׃���؏���Eri=0.01%�����u݆���������������칤ˇ��׃����ѭ�F�е�Ӌ���z��Ҏ�̡�ʹ�ìF�еęz��������ֻ�nj��z��������ʹ�÷����ԼӸ�׃���п��ܳɰٱ�����ߜy�����ȡ�
�����u݆����������ݔ�����}�_��̖�l��F=Nxn(N�ǜu݆�~Ƭ����n�ǜu݆�����D�ٶ�);���^�u݆�����������ı��y���w�w�e����Q=Sxu(S�����w����ͨ����e��u���w���|������);�u݆����
����݆�����������ăx��ϵ��K�cQ���Pϵ���ƾ��ԵĆ��{����(Ҋ�D2)����ˣ��ڌ��z���Y���M��̎��r��ֱ�ӌ����z���c�ęz���Y����Fi��Ki����ʽ����u݆����Ӌ�Ĕ�ֵ�\�㲿�֣����،���x��ϵ��ȡƽ��ֵ����ʹ�Üu݆�����������M�������y���r�������u݆��������������̖�l��F�����������ϙz���Y���Йz����F,ֵ���ҳ��M��F,��F��F��Fi��Fi+1(i=1,2,.��.n-1)��n��ԓ�u݆�����������������z���c��;����̖�l��F=Fi��F=Fi+1���t������Ki��K.i+1��������ăx��ϵ��;����̖�l��Fi<F<Fi+1�������y�õ���̖�l�ʲ������ڙz�y�l���c�ϣ��˕r�ăx��ϵ��K�����þ��Բ�ֵ��ʽ(7)��Ӌ��:
�����@�NӋ�㷽�����OӋ˼·���ڙz���l���c��ֱ���Ùz���c�ęz���x��ϵ�������`�����ԓ�c���؏����`���g;�ڙz���l���c֮�g�Ͳ��������ɂ��z���c�ęz���x��ϵ��K��Ki+1�ľ��Բ�ֵ�õ�ԓ�c�ăx��ϵ��K���ɴˎ��������y���`��ĘO��ֵ��K��Ki+1֮�g�ķǾ����`���?max������Ӌ���z���c�ǰ����b��Ҏ��(JJG198-94)�_���ģ����Ը��z���c�ķǾ����`���?max�cȫ���̷Ǿ����`���֮�g���M���?max=��/n.Ҳ�����fʹ���@�NӋ�㷽���õ��Ĝy���Y�����`��ֵֻ�в���ƽ���x��ϵ���r1/n���ڜu݆�����������ăx��ϵ��K�c����Q֮�g��Q��Q���r�����ʾ����Pϵ�������þ��Բ�ֵ���õ��Č��H�Ĝy���`��8'���ӽ��؏����`��ER���hС�ڷǾ����`���?max������'��En<ER<��?max��
�����@�NӋ�㷽���cƽ���x��ϵ�������ą^�e���ڜu݆����Ӌ�Ĕ����惦�^�д�ŵ���n�M���H�z���Y��������һ��ƽ���x��ϵ��`K;ʹ������Ӌ�M�������y���r�������y�õ��l��ֵF�ҵ��c֮������һ���z���l���c(Fi,Fi+1)��������һ���z���x��ϵ��(Ki��Ki+1),���Ǻ��ε��Üy�õ��l��ֵF����ƽ���x��ϵ��`K�͵õ��ˮ�ǰ����ֵ;����(Fi,Fi+1).(Ki��Ki+1)�����ù�ʽ(7)Ӌ���������̖�l��F�ăx��ϵ��K,Ȼ����ԓ�l��ֵF����Ӌ��õ��ăx��ϵ��K�õ���ǰ����Q���@�N�����ɷQ֮�顰�z��ϵ���۾���"���@�Nʹ�÷������Ʊ���ƽ���x��ϵ������������Ŀǰ�V�����õ��C���x���зdz������F;���ô˷��ڿɾ��̿�����(PLC)�Լ�Ӌ��C�z�y������ϵ�y���M�������y���������ڴ_�������̷�������ߜu݆�����������Ĝy�����Ȼ����ڴ_�����_�y����ǰ���U��y��������
4��������
�������z�x��:���Qͨ���քe��10mm��15mm�Ĝu݆������������һ�_;�z���b��:�o�B�Q�ط��˜�ˮ�����z���b�ã�ϵ�y����+0.2%���քe���ó�Ҏ��ƽ���x��ϵ�����͙z��ϵ���۾����M�И�.�������c����˜ʵ��o�B�Q�ط��ęz���Y���M�бȌ����Y��Ҋ��1.��2��
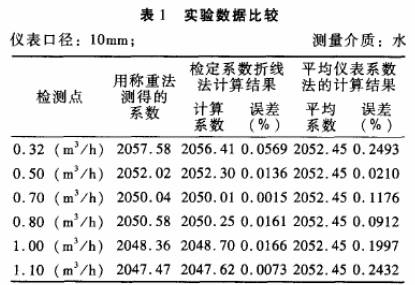
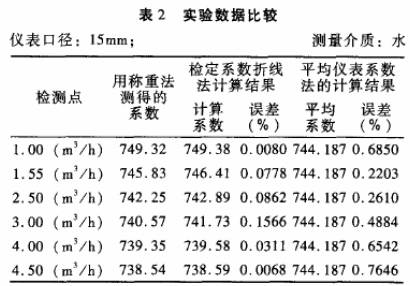
�����ı�1��Ҋ������ͬ�����̷���(0.32m3/h~1.10m3/h)�ȣ�ʹ�ó�Ҏƽ���x��ϵ���������Ǿ����`���0.2493%����ʹ�Ùz��ϵ���۾���������`��ֻ��0.0569%���`��A����4����;��2�@ʾ��ʹ�ó�Ҏƽ���x��ϵ���������Ǿ����`���0.7646%������ͬ�����̷���(0.5m3/h~5.0m'/h)�ȣ��z��ϵ���۾���������`��ֻ��0.1566%���p���˽�5�����@Ȼ����ͬ�ӵĜy������ˮƽ(�猦10mm�u݆ȡ0.2������15mm�u݆ȡ0.5��)�£����Ùz��ϵ���������u݆�����������Ĝy��������ʹ�ó�Ҏ��ƽ���x��ϵ�����������@�ĔU��
���σ���Դ�ھW�j�������֙�ϵ���h��!